Resources
 Angular Displacement Transducer (ADT) Technology
Angular Displacement Transducer (ADT) Technology
Trans-Tek designs and manufactures a complete line of Angular Displacement Transducers (ADTs) using capacitive technology. The ADT consists of a differential capacitor with a movable rotor, a shaft mounted in precision ball bearings, and signal conditioning electronics for DC in – DC out operation. The capacitive sensor within the transducer consists of 3 parts: a transmitting electrode, a grounded rotor, and a receiving board containing 2 or 4 separate electrodes. Differencing the capacitance between the receiving electrodes yields an output that is proportional to angular displacement.
The exploded view above for the Series 600 transducers shows the internal construction of a typical Trans-Tek ADT. The base and shaft assembly consist of the mounting platform and a precision ball bearing assembly mounted over the shaft. The transmitting board is mounted directly to the base. The rotor is connected to the shaft, and is sandwiched between the transmitting and receiving electrodes. Mounted on top of this assembly is the oscillator/demodulator and filtering circuitry. The housing fits snugly over the entire assembly, and is secured to the base.
A DC voltage is applied to the input terminals of the transducer, which powers an oscillator. The oscillator generates a high frequency AC voltage (400-500 kHz), which is applied to the transmitting electrode.
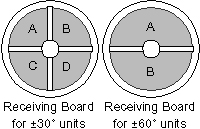 The receiving board contains 2 to 4 “receiving” plates, the shape of which are determined by the maximum angular stroke the transducer is designed to measure. The receiving plates are at virtual ground, while the rotor is at true ground. Although the total capacitance between the transmitting and receiving plates will remain constant, the capacitance between the separate receiving plates will vary with the position of the rotor.
The receiving board contains 2 to 4 “receiving” plates, the shape of which are determined by the maximum angular stroke the transducer is designed to measure. The receiving plates are at virtual ground, while the rotor is at true ground. Although the total capacitance between the transmitting and receiving plates will remain constant, the capacitance between the separate receiving plates will vary with the position of the rotor.
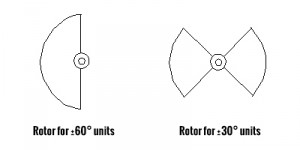
There are 2 receiving boards: one for the ±30° units, and the other for the ±60° units. The ±30° version is divided into 4 sections. Sections A and D are connected together as one section (AD), as are sections B and C (BC). The capacitance from AD and BC is differenced. At the center of the measuring range, the rotor is equally positioned over Sections AD and BC. The capacitance at this point between the transmitting plate and AD, and the transmitting plate and BC will be equal, providing zero output volts. As the rotor moves clockwise or counterclockwise, the capacitance of one section becomes greater than that of the other section, and the differential output is proportional to the angular distance moved from the zero point. The same is true for the ±60° version, where sections A and B are differenced.
Since the capacitive element is powered by a high frequency AC signal, we include sophisticated electronics in the final assembly to provide convenient DC in – DC out operation. A 3-pole filter on the output signal delivers a desirable mix of low output ripple and high frequency response, making these transducers ideal for applications requiring an absolute, high accuracy, angular position sensing device.